Mehmet Eren Kala
I'm a Mechatronics Engineering student who has inherent interest in Robotics and Artificial Intelligence
About Me
About Me
Reliable and hardworking student. Always seeking for new skills and self-development.
Featured Completed Projects
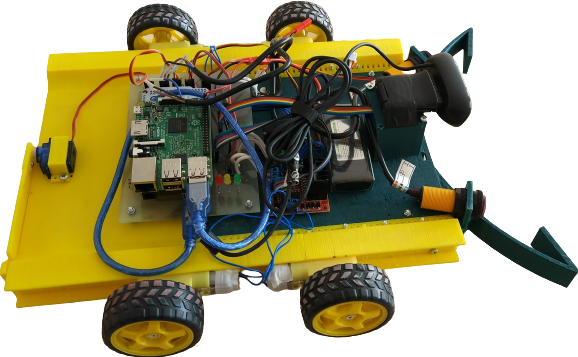
Developed a low-cost autonomous driving platform based on the End-to-End approach. It is able to drive autonomously using only cameras, mimicking human behavior and is fully open sourced. In an effort to lower costs, tried to use the least amount of sensors possible and focused more on software development. This platform allows for a cost-effective way to learn autonomous driving technology The project is fully open sourced. For more info check out the Project Page.

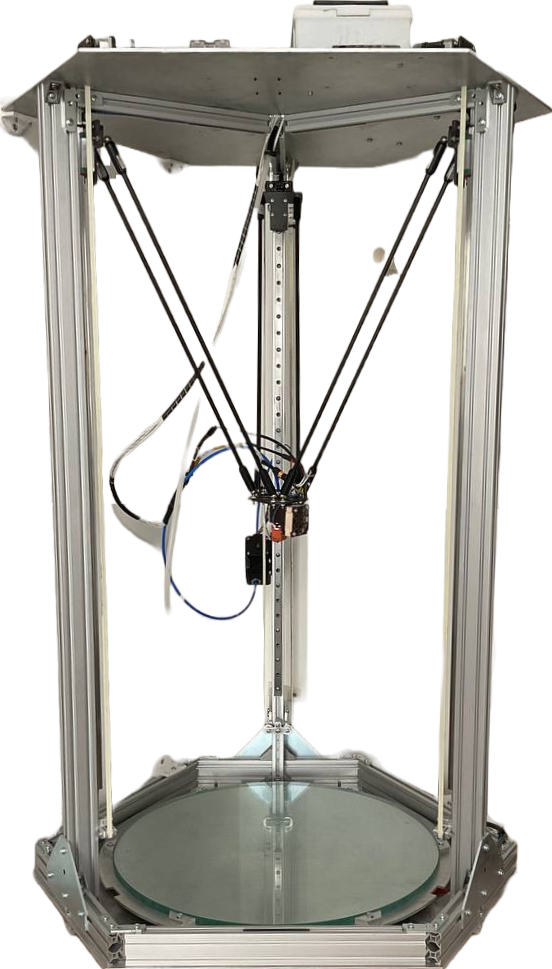
Designed and built a 3D printer according to my specific needs. It has a large printing size of 460 mm ø x 450 mm h. The printer features a fully metal construction and linear rails on all axis. Carbon fiber is used on moving parts such as the arms, effector and side effectors to reduce inertia, enabling the printer to achieve high printing speeds. It also has a bed air cooling system and a quickly changeable toolhead. The toolhead can be equipped with a laser for cutting and engraving. Overall, the printer is easy to fix and maintain.
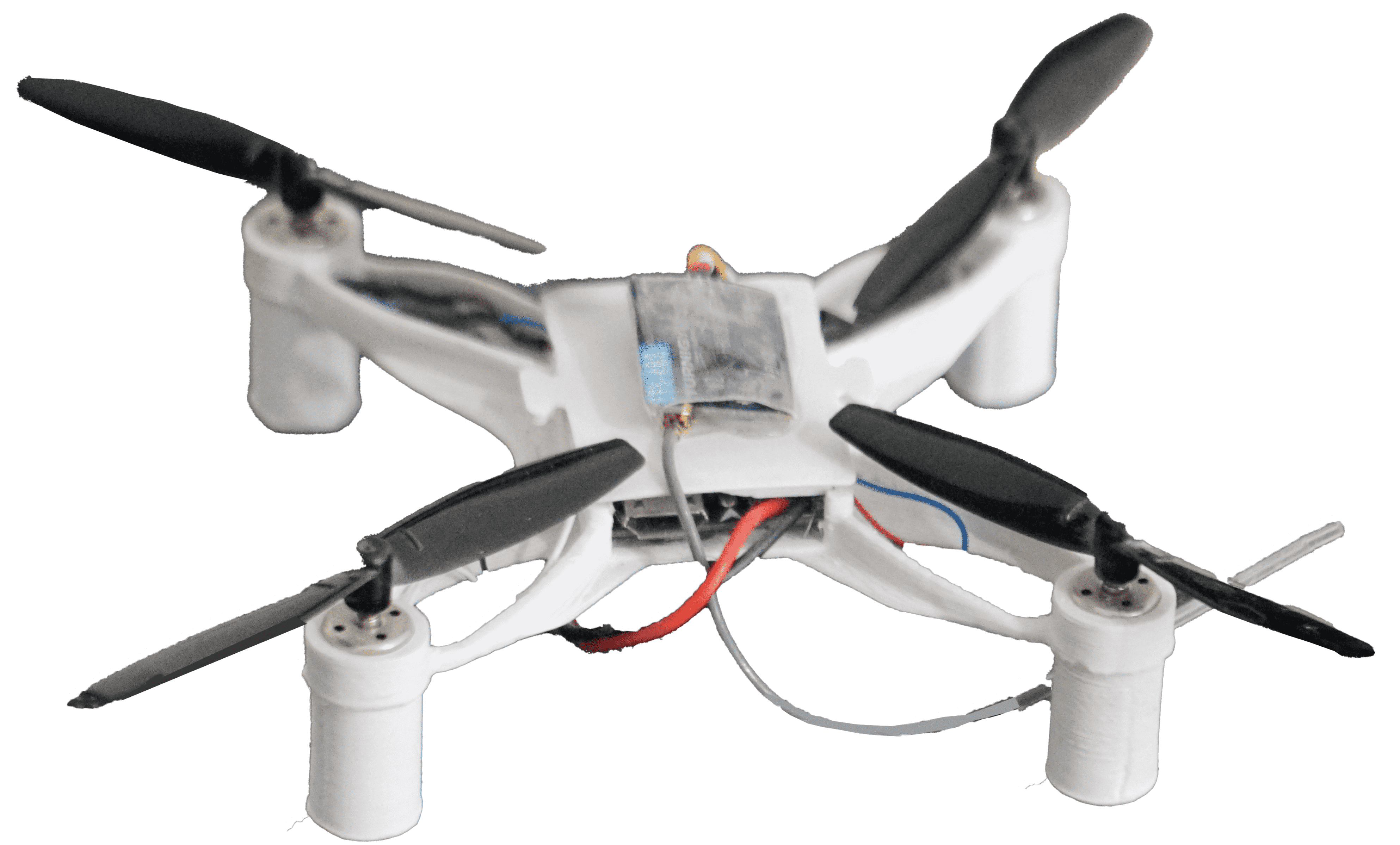
Designed and built a lightweight drone frame, with a dry weight of only 36g. Despite its light weight, the frame is strong and easy to print. It also includes motor and motor wire protection, and can be modified to accommodate specific flight controllers, batteries, and FPV equipment. For more info check out the Project Page.
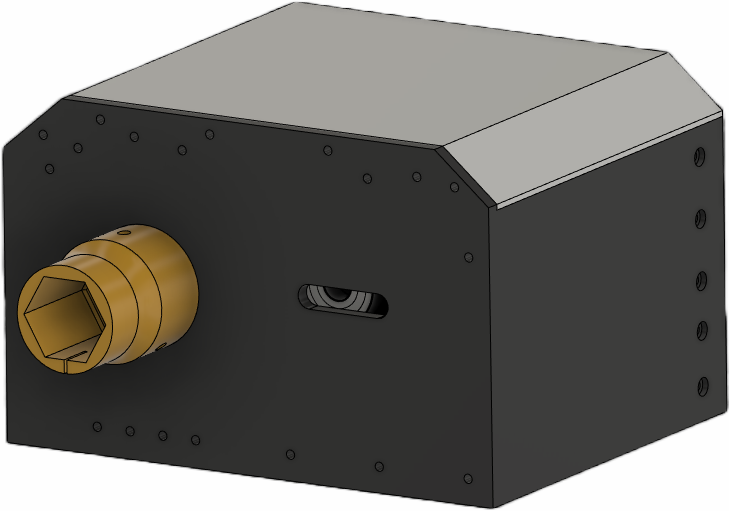
Designed and built a low cost sim racing wheel that offers a realistic driving experience. The wheel is powered by two onboard dc motors that provide a high amount of torque, and uses a belt drive system for smooth and responsive power delivery. Despite its small and compact form factor, the sim racing wheel is able to simulate the feeling of driving a real car. Overall, it is a cost-effective and immersive way to experience the thrill of racing.
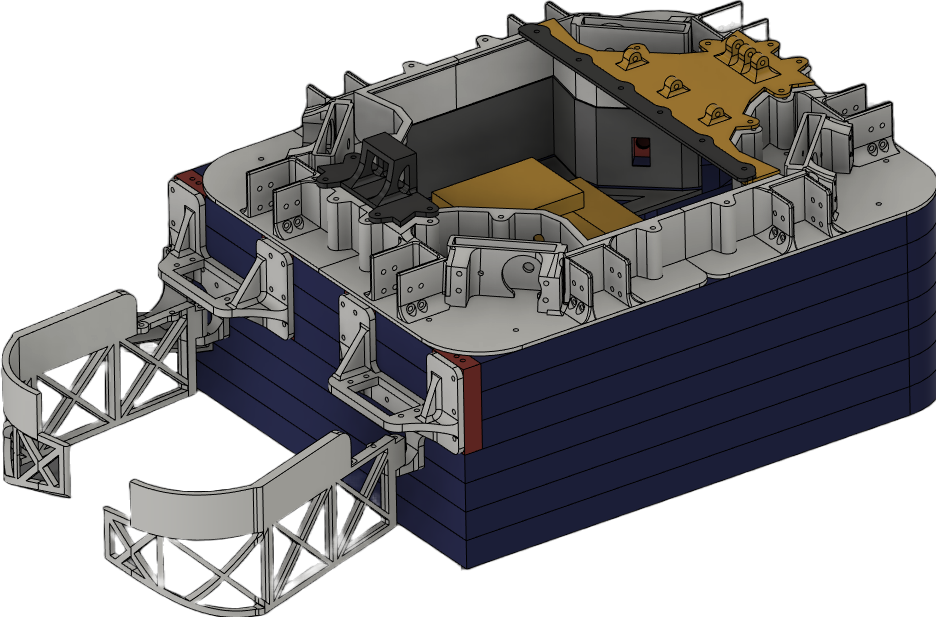
The robot for the Teknofest 2019 Robot Competition is built and programmed by a team. It is an autonomous boat that is capable of transporting other boats to a predetermined location, using camera and lidar sensors for autonomous navigation and piloting. The boat is also able to distinguish between allied and enemy boats, as well as identify targets. It possesses an onboard gun system, enabling it to shoot at identified targets.
Built and programmed a robot for the International MoNE Robot Competition with my team. The competition involved collecting small colored eggs and bringing them to designated collection fields, and scores were given based on the number of eggs collected within a specific time frame. The robots raced against each other in a designated area.